第16回:農業機械にもっとも多く使われるセンサについて
農業機械の自動化装置にもっとも多く使われるセンサは可変抵抗器です。
ボリュームとか、ポテンショ・メータとか言われるものです。
今回は、サーキット・テスタを使って可変抵抗器の故障診断を行う方法について記載します。
サーキット・テスタを使って可変抵抗器をテストしたり、出力線の電圧を測定したりして故障診断することは、どの機械の修理にも応用が効きますので是非活用してください。
可変抵抗器の診断と言っても、その診断に至るまでの予備知識が必要ですが、電気、電子回路について説明するには膨大になり過ぎてしまいます。
したがって、基礎的な事についての説明は省かして頂きますのでご理解ください。
また、マイコンなどの制御回路を然程理解していなくても、その回りの作動を理解していれば殆どの電気系のトラブルは解決できると思います。
それは、マイコン前後の回路や装置で起こるトラブルが多いからです。
しかしながら、プログラムまでは書けなくていいので、ある程度は半導体の役割とリレー・シーケンス制御を理解しておく必要があります。
具体的に故障診断の例を挙げてみます。
例えば、トラクターでロータリ耕運作業時に、自動耕深制御を使っても一定の深さで耕せない症状がを起こるとします。
※自動耕深装置を切った状態でなら、油圧レバー操作(ワンタッチ・レバー操作を含む)は正常に昇降作動する。また、ユニバーサル・ジョイント、耕運爪は良好において。
この場合、よくある症状として次の原因が考えられます。
- 機械的な制御でロータリを昇降させてるいるトラクター
- ①カバー・センサ・ワイヤが膠着している。
- ②均平板が側板に付着した泥に引っかかっている。
- ③均平板がフリーになっていない。
- ②均平板が側板に付着した泥に引っかかっている。
- 電気的な制御でロータリを昇降させているトラクター
- ①カバー・センサ・ワイヤが膠着している。(ワイヤを使わず、直接センサをロータリに取り付けているトラクターは関係ありません…イセキに多い)
- ②均平板が側板に付着した泥に引っかかっている。
- ③均平板がフリーになっていない。
- ④カバー・センサの故障。
- ⑤配線の断線、コネクタ接触不良。
- ⑥操作ボックス(コントローラ)の耕深ダイヤル不良、スイッチ不良。
- ②均平板が側板に付着した泥に引っかかっている。
注意:ごく稀にマイコン・ユニットが故障してる場合もあります。
また、自動水平異常の場合はどちらかに傾いたままになるなどして、左右どちらかが浅くなったり深くなったりしますが、上記とは意味合いが違います。
そして、制御が異なるので関係ありません。
機械的か電気的かの簡易的な判断方法は、耕深調節が油圧(ポジション)レバーの隣に並んで、大きいレバーで行うタイプは機械式で、ダイヤルや小さいレバーで行うものは大抵は電気式です。
①②③は見て触って分かると思いますが、④⑤⑥は、自己診断機能やテスタ機能があるトラクターを除くと、サーキット・テスタを使わないと分かりません。
④のカバー・センサと⑥の操作ボックスの耕深ダイヤルは、一般に可変抵抗器が使われていますが、可変抵抗器は抵抗値、変化特性、回転角などいろいろ種類があり、使用環境や使用頻度に応じて劣化していくものです。
ここからは、④のカバー・センサの故障と、⑤の配線の断線、コネクタ接触不良についての点検方法を説明していきます。
下例は自己診断機能付きのトラクターですが、説明のためにサーキット・テスタを使います。
必要工具と道具: サーキット・テスタ(マルチ・メータ)、汎用工具(トラクターによる)
◎カバー・センサの故障診断について
 カバー・センサです。
カバー・センサです。
このセンサは、センサ・ワイヤを介してロータリの均平板(ロータリ・カバー)の上下を感知します。
コネクタを外します。
機械的な回転角は120度(電気的有効角110度)の可変抵抗器です。
変化特性は、もっともよく使われる直線的なタイプ(B)です。
※両端5度分は抵抗変化がない。
 まず、両端の抵抗を測定します。
まず、両端の抵抗を測定します。
このトラクターに使われるカバー・センサは2kΩのものなので、1.6~2.4kΩの範囲内ならOKとします。
可変抵抗器やコイルなどの実測抵抗値は、これくらいのばらつきがあるものです…。
テスタは抵抗測定モードなので、赤黒どちらも極性はありません。
 両端がOKなら、次は左写真のように両端と真ん中をそれぞれ2通り測定します。
両端がOKなら、次は左写真のように両端と真ん中をそれぞれ2通り測定します。
2kΩのポテンショ・メータの場合
+入力線と中間線:2k→0
中間線とGND線:0→2k
例えば+入力線と中間線が1.5kΩの時は、中間線とGND線は0.5kΩになっています。
軸にがたつきがある場合
軸のがたつきが酷い場合は、その時点で不良と考えたほうが賢明です。
 手でゆっくりレバーを回していき、抵抗値が滑らかに変化していけばOKです。
手でゆっくりレバーを回していき、抵抗値が滑らかに変化していけばOKです。
両端の測定値が2kΩなら、0~2kΩまで変化します。
よくある症状は、回していく途中で一瞬切れることです。
そうなったら交換です。
アナログ・テスタのほうが抵抗値の変化は分かり易いですが、私はデジタルのほうが扱い易く好きです。
デジタル・テスタを使う場合は、よりゆっくり行わないと表示上の測定値が一瞬切れることがあります。
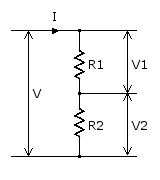 可変抵抗器は、2つの抵抗を直列に接続して、その抵抗間から中間線を出しているようなものです。
可変抵抗器は、2つの抵抗を直列に接続して、その抵抗間から中間線を出しているようなものです。
左回路図を例に、電圧(V)、電流(I)、抵抗(R)の関係を説明します。
抵抗を直列接続すると、その総和が合成抵抗値(R)になります。
R=R1+R2
また、直列接続されているどの抵抗にも同じ電流が流れます。
そして、電源電圧はそれぞれの抵抗の電圧降下の和に等しくなります。
V=V1+V2
これらは、オームの法則(V=IR)が成り立ちます。
V=IR2
V=IR1+IR2
可変抵抗器は中間線を境に抵抗を2分するので、それぞれ(V1とV2)にかかっている電圧が違ってきます。
つまり、ポテンショ・メータやボリュームにおいて、検出位置が変化すれば抵抗値が変わるので、電圧を変化させることが出来るのです。
この変化するアナログ電圧のV2側を、A/Dコンバータ(マイコン内)でディジタル(1、0の信号)信号に置き換えられます。
取り出し電圧の例
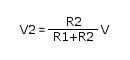 ロータリ均平板が最上端時のR2抵抗値は1.7kΩ、最下端時のR2抵抗値は0.4kΩであった場合の取り出し電圧V2を考えて見ます。
ロータリ均平板が最上端時のR2抵抗値は1.7kΩ、最下端時のR2抵抗値は0.4kΩであった場合の取り出し電圧V2を考えて見ます。
ちなみに入力電圧Vは、実機でもっとも使われる電圧5Vです。
上の方程式を使います。
V2=VR2/(R1+R2)
最上端時のV2取り出し電圧
V2=8.5/(0.4+1.7) V2=4.0476…
V2=4.05
最下端時のV2取り出し電圧
V2=2/(1.7+0.4) V2=0.9523…
V2=0.95
◎センサ出入力線の診断について
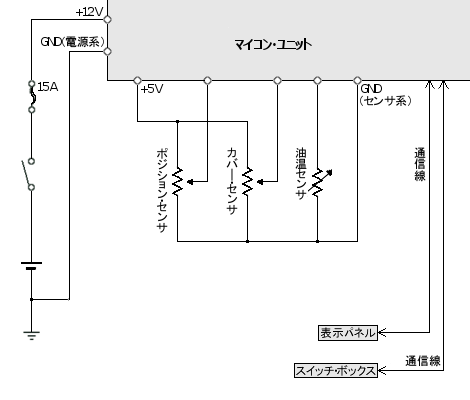
注意:この回路図は出来るだけ解り易く記したものなので、例えばフュージブル・リンクやアクチュエータ回路などは記していません。
また、通信線とありますが、その配線束には電源線も含まれていたりします。
当然ですが、実際には他にも多くの電子部品が使われています。
通常、可変抵抗器の出入力線は、上図のように3本の線でマイコン・ユニットと繋がっています。
エンジンを始動したら、カバー・センサの両端には常に約5Vの電圧がかかり続けます。
そして、+線と中間線、中間線とアース線には分圧された電圧がそれぞれかかり続けます。
そのうちの中間線とGND線にかかる電圧は、マイコン・ユニット内で読み取りが行われ比較処理されます。
通常、農業機械のセンサ入力電圧はDC5Vを使用することが多いです。
バッテリ電圧はDC12Vなので、ECU内でDC5V電圧を作り出しています。
これは、抵抗分圧や3端子レギュレータなどで5Vに落としています。
電圧を落とす理由としては、同じ電位では、ヘッド・ライトなど他の負荷の作動によっておこる電圧変動の影響をマイコンが受けるのは都合が悪く、電圧を落とすことでコンデンサなどを使い、制御用の安定化電源を作り出せるためです。
そして、半導体の多くはDC3~5Vで作動するものが多いためです。
もちろんDC12Vでも制御は可能ですが、部品代が高くつくし、電力の無駄使いになりますね。
マイコン・ユニットのセンサ出力線の簡易診断
カバー・センサの接続コネクタを外して、マイコン出力側のコネクタ元でサーキット・テスタを使って測定します。
必要モード:サーキット・テスタDC電圧測定モード、導通試験モード(抵抗レンジ)
注意:導通試験をする場合は、バッテリの端子を外して行って下さい。
- ①キー・スイッチをONにして、両端にかかる電圧を測定し、約5Vと表示されるか確認します。
(バッテリ、アース線、キー・スイッチなど正常において…パネルに電気が点く状態) - 電圧が出ていない場合は、まずマイコン・ユニットのヒューズを確認します。
切れている場合は、マイコン・ユニット入力電源の+線と他のセンサの+線が、アース線やボディなどに短絡していないか原因を調べます。…ヒューズが切れている場合は他の制御も働きません。
そして、ヒューズが切れていないのに5V電圧が測定できない場合は、配線の断線、コネクタ接触不良、センサ系のアース不良を調べます。
異常がなければマイコン・ユニットの故障になります。
マイコン・ユニットは、分解できるタイプなら分解してみましょう。
はんだがクラックしているくらいなら、回路が解らなくても修理可能ですね。
その場合は、熱を与え過ぎないよう十分注意しながらはんだを付け直します。 - ②GND(アース)線は、トラクターのボディと導通している事を確認します。
- アース線の断線、コネクタ接触不良を調べます。
センサ系のアース線はアース線どうし統合されていて分り易いので、断線してる場合は作り変えてもいいと思います。
12VのGNDと5VのGNDは同電位になります。
途中で述べた分圧の理屈ですね。 - ③中間線は、+線、ボディと導通していない事を確認します。
- 導通していたら、漏電、短絡しているので調べます。
通常、ヒューズは切れません。
※ADコンバータの入力抵抗を介しての接地はあるため、完全な絶縁状態ではありません。
自己診断機能
現在トラクター(他機械を含む)は、故障箇所を自己診断して表示パネルに表示させる機能が搭載されています。
そして、通常時にも異常があると表示パネルに何らかのエラー表示をする仕組みになっているものが殆どです。
多くの場合、自己診断機能には幾つかのモードがあります。
一つは、例えばセンサ(ポテンショ・メータなど)などの異常時に出力した異常電圧をディジタル信号としてマイコンに記憶しておき、自己診断機能を使ってその履歴を呼び戻すものです。
一つは、各レバーやロータリ位置などを決められた基準位置(設定条件)にして、その基準位置における各センサ(ポテンショ・メータなど)を返した出力電圧をマイコンが読み取って、異常個所を判別するものです。
この方法は基準位置の出力電圧を比較して判別するだけなので、可変時のポテンショ・メータの出力電圧は判別できません。
つまり自己診断で異常が無くても、必ずしもセンサは正常とは言い切れません。
更に通常これらの方式では、スイッチ関係のエラーは記憶(表示)されません。
一つは、各スイッチがちゃんと反応しているか、各センサを通した電圧が正確に出ているか、これらをブザーや電圧表示などで直接知る事ができるものです。
このモードが修理する側にとって最も有難く有益なのです。
表示パネルで表示される主なもの
- 異常箇所を何かの表示灯に置き換えて知らせます。
また、点滅回数によって異常個所が分かるようになっています。
点滅させる表示灯は機械によって様々です。 - 異常個所を言葉で表示します。
- 各センサの取り出し電圧を表示します。(テスタ・モード)
3つ目の取り出し電圧が一番重要です。
ボリュームやポテンショ・メータ自体は異常なくても、マイコンがこれらのセンサを返して読み込む電圧が有効電圧から外れているとエラーになるからです。
例えば、リフト・アーム・センサにおいてマイコンが判別に使う電圧(有効電圧)は0.9V~4.1Vとした場合、リフト・アーム・センサを返してマイコンが読み込む電圧は、ロータリの最上げ時が4.1Vを越えないように、また最下げ時では0.9Vを下回ってはいけません。
仮に、マイコンが読み込む電圧が0.5Vの場合はエラーになります。
5Vの電源が安定しているとして、このようなエラーはリフト・アーム・センサの電気的有効角が経年劣化!?(分かりません)によってズレる(変わる)と起こりえます。
これをセンサの故障というべきか分かりませんが、このようなズレをサーキット・テスタで判別するのは不可能に近いです。
書き換え機能(微調整)
- センサ取り付け部が固定のタイプ(調整不可能)
- 各センサの基準値を設定するため、RAM(ラム)の書き換えが必要になります。
トラクターでは主に、自動水平制御などの水平基準値の設定をし直す作業です。
しかし、今回説明にあるカバー・センサは通常例外で、書き換えする必要がない場合もあります。
(作業機の着脱をするため)
コネクタを外したり部品交換などした場合には、始動時の最初にロータリを最上げ位置にしたとき、自動でカバー・センサの基準値を記憶する仕組みになっていたりします。 - センサ取り付け部のネジ穴が長穴になっているタイプ
- そのセンサに対してのRAM(ラム)の書き換えはありません。
センサの取り付け位置で調整し、基準位置を合わせます。
また、水平制御は微調整用のボリューム(水平、平行)や、調整ロッド(水平、平行)をドライバで調整して行います。
※「平行」とはポジション・レバー最上げ位置において、トラクターに対してロータリが平行であるかということです。
通常、自己診断機能や書き換え機能を行うには、トラクター水平、ポジション・レバー最上げ位置などその機械ごとの設定条件にした上で、規定の操作をして行うことが出来ます。
また、特別な機材は必要なく、手順のみの簡単操作で行えます。
例:作業姿勢スイッチを上げ側にしながら、キー・スイッチON、その後再度作業姿勢スイッチをONにするなど。
◎可変抵抗器が使われてる主な箇所
- 操作ボックス
- トラクター:自動耕深ダイヤル、自動水平ダイヤルなど
- コンバイン:自動水平ダイヤル、刈り高さ自動ダイヤルなど
- 乾燥機:穀物量ダイヤル、停止水分ダイヤルなど
- コンバイン:自動水平ダイヤル、刈り高さ自動ダイヤルなど
- 作業位置の検出
- トラクター:カバー・センサ(均平板位置検出)、リフト・アーム・センサ(リフト・アーム位置検出)、ストローク・センサ(リフト・シリンダ位置検出)、切れ角センサ(ハンドル位置検出)など
- コンバイン:オーガ位置検出センサ、主変速レバー位置検出センサなど